![]()
 銷售熱線:158-1687-3821
銷售熱線:158-1687-3821
![]()
銷售熱線:158-1687-3821
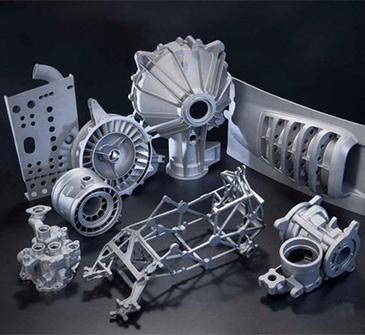
基于柔性3D打印的介電驅(qū)動器件,設(shè)計(jì)了兩種代表性的柔性驅(qū)動器件,軟體魚和軟體抓手,獲得了理想的驅(qū)動效果,整個設(shè)計(jì)和測試條件為柔性器件一體化快速成型提供了參考思路,具體的研究過程如下:
設(shè)計(jì)了軟體機(jī)器魚的結(jié)構(gòu)形式和驅(qū)動區(qū)域,采用“VHB-碳膏-VHB”的水下驅(qū)動形式。確定了一體化3D打印工藝,將驅(qū)動框架和柔性框架結(jié)合在一起,實(shí)現(xiàn)了介電薄膜(VHB)和柔性基體(TPU)的高質(zhì)量粘合。
軟體魚達(dá)到了穩(wěn)定的游動效杲,實(shí)現(xiàn)3cm/s的穩(wěn)定游動速度,并進(jìn)一步提出了自帶電源游動的軟體魚形式。
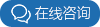
此次3D打印設(shè)備設(shè)計(jì)主要是針對特種工程塑料,相比于普通塑料和工程塑料,其熔點(diǎn)更高、流動性更差、加工環(huán)境苛刻,因此需要對普通3D打印設(shè)備進(jìn)行升級改造,以適應(yīng)新的加工對象。塑料的3D打印需要經(jīng)過加熱熔融和熔體固化的過程,在微尺度下就是聚合物的固態(tài)-液態(tài)-固態(tài)轉(zhuǎn)變的過程。在這期間高分子結(jié)構(gòu)形態(tài)受加工條件影響也發(fā)生改變,最后影響打印制品的物理性能和表面質(zhì)量。特種工程塑料加工條件重點(diǎn)是噴頭的加熱和溫控室的調(diào)節(jié)。前者是針對固-液轉(zhuǎn)變過程,后者是針對液-固轉(zhuǎn)變過程。由于特種工程塑料熔點(diǎn)大多在300°C以上,結(jié)晶性差,因此需要打印機(jī)中各部件保持高性能水平,其中就包括打印噴頭、溫控室、外框架、移動組件、打印平臺等。