隨著科技水平的持續提升,企業生產機器人的規模呈現擴大趨勢。機器人作為自動執行任務的機器裝置,不僅能夠接受人類指令,還可通過預先設定的程序或人工智能技術制定的規則完成操作。在機器人正式投產前,需通過打印手板模型進行功能驗證。那么,3D打印機器人手板模型通常采用哪些材料?
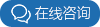
機器人的屬性差異決定了材料選擇的多樣性。例如,以塑料結構為主的機器人,其外殼手板模型多采用光敏樹脂制作;而金屬材質的機器人則常用鋁合金或不銹鋼作為外殼材料。部分金屬構件同樣會通過3D打印工藝實現,形成塑料與金屬材料復合的機器人外殼手板模型。
具體到機器人本體結構,光敏樹脂是制作手板模型的常用材料。機器人臂部多采用空間開鏈連桿機構設計,該部分常選用鋁合金手板以實現輕量化與強度平衡。機器人運動副(即關節)的配置直接決定其自由度數,關節型式與運動坐標形式的差異,使得機器人本體被劃分為基座、腰部、臂部、腕部、手部夾持器(或末端執行器)及行走部(針對移動機器人)等功能模塊。
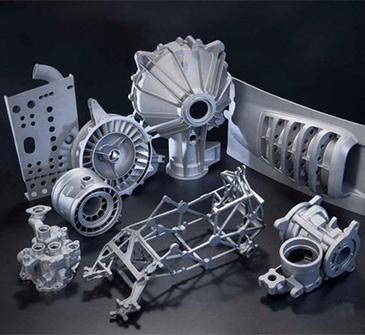
值得注意的是,機器人內部金屬構件較少,通常僅涉及線路板固定支架等輔助結構。通過制作手板模型,可有效驗證機器人的多項功能,例如執行機構的運動模式(包括直角坐標式、圓柱坐標式、極坐標式和關節坐標式等類型)。無論是單件手板模型驗證還是小批量試產,當前均以CNC加工工藝為主導制作方式。
標簽:
上一篇:哪些領域中可以用到現代化的金屬3D打印技術
下一篇:實驗室培育木材讓3D打印生物材料更加多樣化
 銷售熱線:158-1687-3821
銷售熱線:158-1687-3821